In this activity you will practice by creating a new launch file, with the nodes that you’ve already created during this course.
Goal:
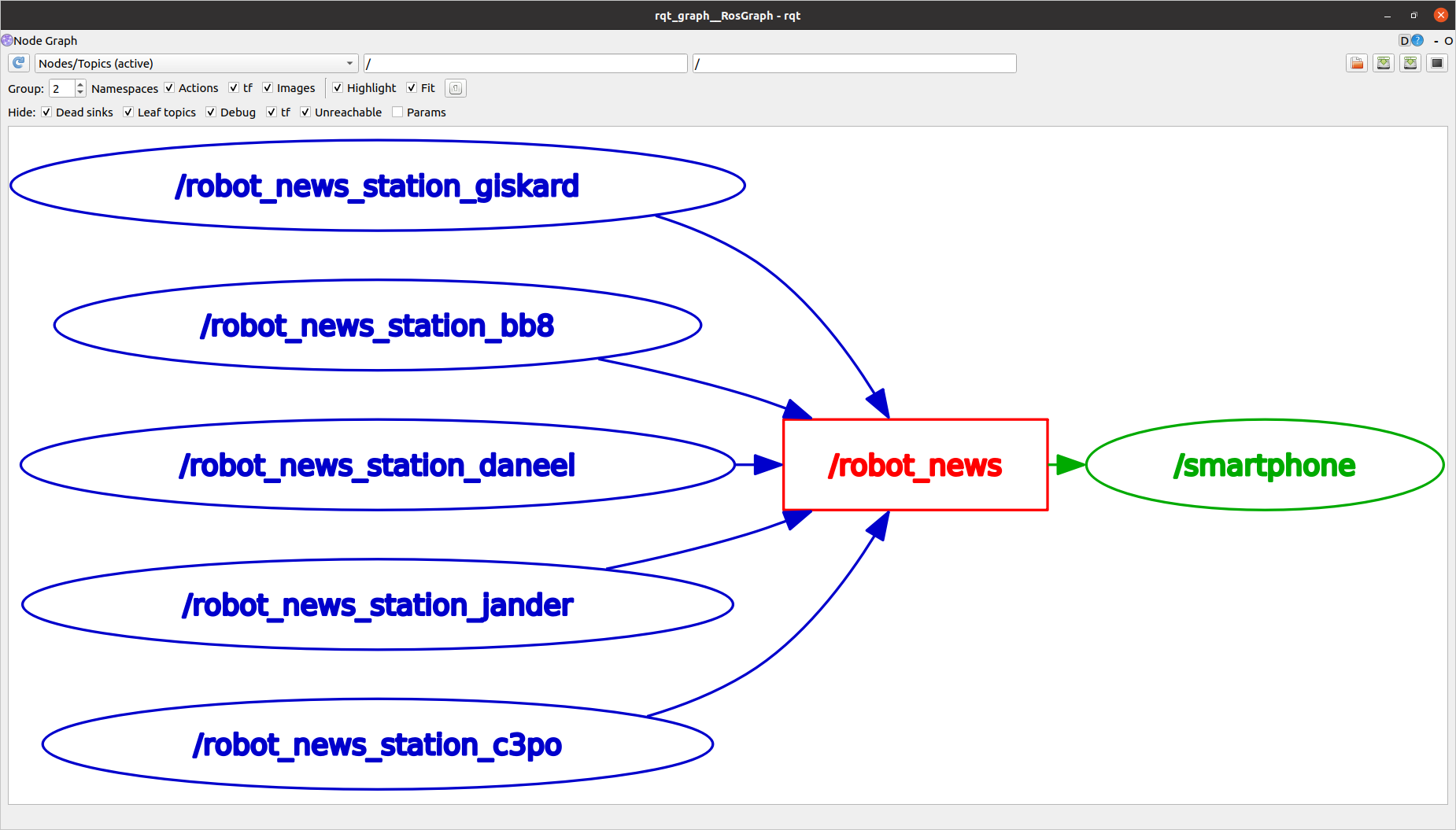
Start 5 “robot_news_station” nodes and 1 smartphone node.
Each “robot_news_station” will need a different name, and will publish "Hi, this is <robot_name> from the Robot News Station!"
The “smartphone” node gets all the messages from all other nodes.
Here’s the graph you should get:
So, no need to create or modify any node here. You just need to create a single launch file.
You can start by providing the parameters one by one in the launch file, and then load them from a YAML file.
I’ll see you in the next lecture for the solution.
Bonus point if you find the book/movie reference for all robot names! (shouldn’t be too hard).